Harbin Institute of Technology (China) Two-arm space “handshake” The small robotic arm jointly developed by Harbin Institute of Technology completed the first dual-arm support for astronauts to walk outside the cabin
Harbin Institute of Technology Media (China Manned Spaceflight Xinhuanet School of Mechanical and Electrical Engineering/Photo CCTV News/Video) At 16:50 on November 17, 2022, Beijing time, after about 5.5 hours of out-of-vehicle activities, Shenzhou 14 astronaut Chen Dong , Liu Yang, and Cai Xuzhe worked closely together to successfully complete all the scheduled tasks for the extravehicular activities. Astronauts Chen Dong and Cai Xuzhe have safely returned to the Wentian experimental module of the space station, and the extravehicular activities have been a complete success. The small robotic arm jointly developed by the team of Academician Liu Hong and Professor Xie Zongwu of the School of Mechanical and Electrical Engineering of our school and the Changguang Institute of Chinese Academy of Sciences completed the first dual-arm combination to support astronauts out of the cabin.
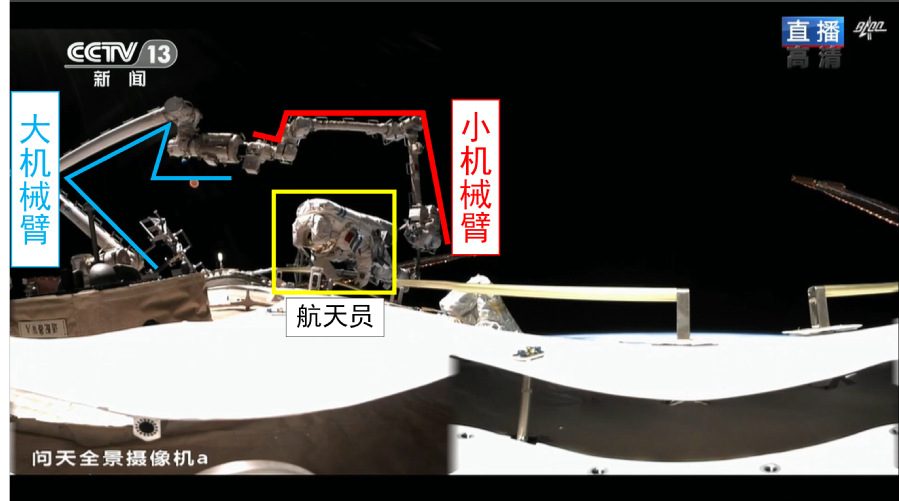
The crew of Shenzhou 14 went out of the cabin for the third time today. This is the first time after the completion of the “T” shaped three-chamber configuration of the space station. In this mission, the small robotic arm was combined with the large robotic arm through a robotic arm adapter to realize electrical and information interconnection between the arms. After the “dual arms are integrated”, the entire robotic arm system has a larger range of motion and more degrees of freedom of operation, realizing a wider range of rapid transfer of astronauts and further improving the efficiency of astronauts’ extravehicular work.
This is the first time that the ability of the astronauts to work with the combined robotic arm has been tested, and the functional performance of the airlock of the Wentian Experimental Module and related support equipment for the extra-cabin activities has been further verified. At the same time, the in-orbit “handshake” of the two arms provides strong support for the follow-up combination of the two arms to complete difficult and diverse tasks, meets the needs of cross-cabin sections and the needs of fine operations in a wide range of different positions on the entire space station, and effectively guarantees my country’s space station construction tasks in orbit Done successfully.
In the future, with the combined arm function, the small robotic arm can be transferred from the Wentian capsule to the Mengtian capsule, realizing the cross-chamber transfer of the small robotic arm, and laying the foundation for the subsequent single-arm operation tasks of the small robotic arm on the Mengtian capsule.
The dual robotic arm system can directly grab the cargo from the open cargo compartment of the Tianzhou cargo spacecraft, and transport it to the exposed load hanging point outside the experimental cabin for installation, thereby realizing “cross-cabin cargo handling”.
After the Tiangong space station completes the in-orbit assembly task, the solar wing of the Tianhe core module will be transferred to the truss of the experimental module for installation in order to solve the problem of light shading. At that time, the double-arm cascading combination function may also be used.